Qwen 发布机器人套件:三个基础模型统一导航、操作与世界建模
6 月 16 日,Qwen 团队发布 Qwen-Robot Suite,一套由三个基础模型组成的机器人套件:Qwen-RobotNav(导航)、Qwen-RobotManip(操作)、Qwen-RobotWorld(世界模型)。三者均采用语言优先接口,可与通用大模型组合成物理智能体系统。
从"看懂"到"能动"
Qwen 系列多模态模型在物理世界理解上已经很强——能解析复杂空间关系、识别杂乱场景中的物体、对物理构型进行推理。但看懂不等于能行动。能规划出"去厨房找到红色杯子拿起来放到架子上"的模型,却无法生成真正执行这些步骤的运动指令。
语言指令与物理动作处于不同的表示空间。更大的挑战是:具身数据天然异构——一段导航轨迹、一次遥操抓取、一段行车记录,分别处于不同的动作空间、观测格式和机器人形态中。简单混合只会产生冲突。
Qwen-Robot Suite 用三个模型分别解决这三个维度的对齐问题。
Qwen-RobotNav:一个模型统一五类导航
导航任务的难点在于不同类型对历史信息的需求截然不同——指令跟随需要保留长程上下文,目标追踪几乎只关注最近几帧。任何固定的视觉分配策略都无法同时满足。
Qwen-RobotNav 把视觉分配策略本身做成了可参数化的:任务模式选择导航行为,可调节参数(视觉 token 预算、时间衰减、单相机权重、帧采样模式)决定视觉历史的编码方式。一套权重,统一了指令跟随、目标搜索、目标追踪、自动驾驶和具身问答(EQA)五大任务族,在 5 个领域拿下 8 项 SOTA。
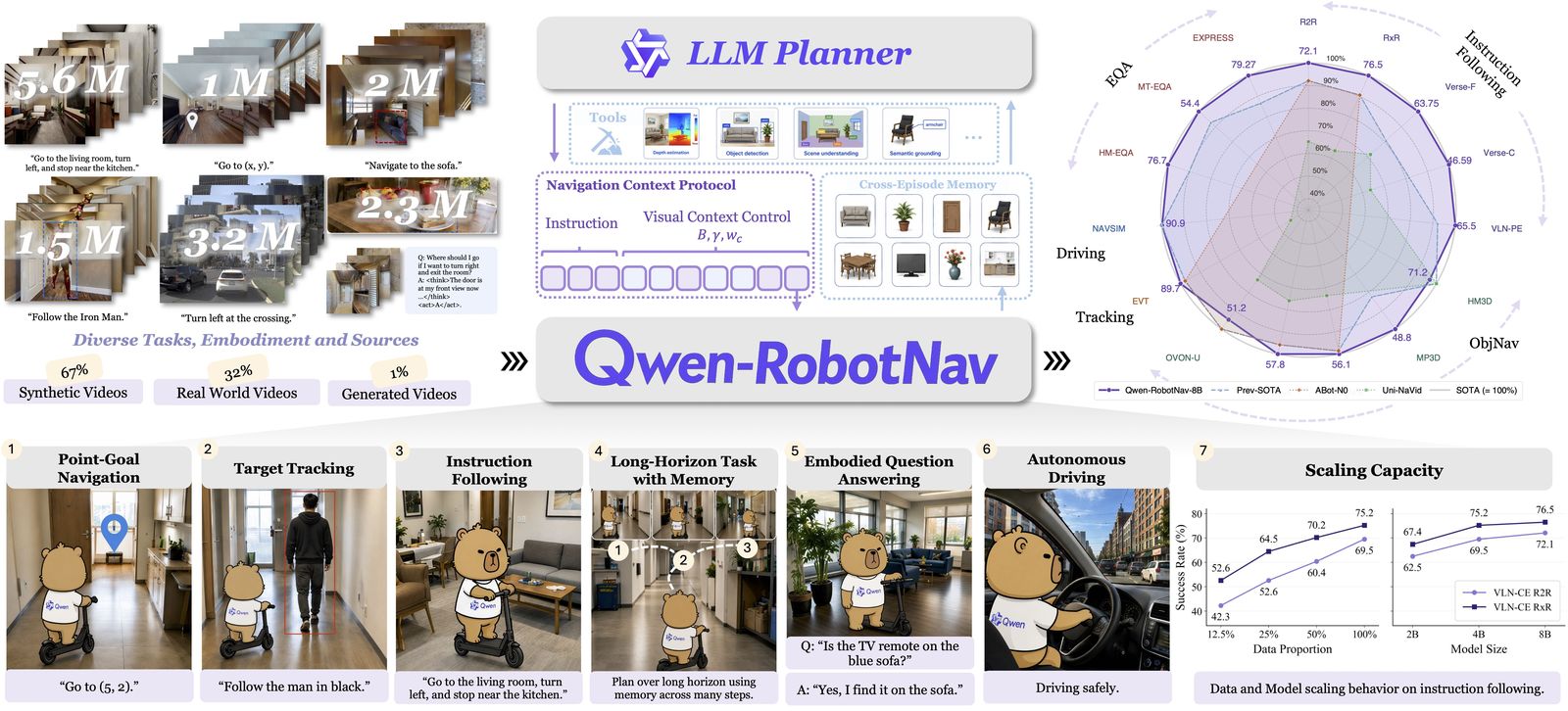
真实部署
零样本部署在宇树 Go2 四足机器人上,使用 NVIDIA Jetson Thor 做端侧推理,延迟 196ms。只用机器人自带的低分辨率摄像头,在从未见过的公寓中根据逐步语言指令跨多房间执行任务。还完成了一个更具挑战性的往返导航测试——从客厅导航 21.78 米至病房,再根据反向指令原路返回。
跨本体迁移同样亮眼:同一套权重同时驱动腿式机器人和自动驾驶,在 NAVSIM 闭环驾驶测试中达到 91.4 PDMS。
Qwen-RobotNav 的参数化接口也天然适合作为智能体系统中的导航模块——上层规划器将长程目标分解为子任务,在执行过程中动态切换任务模式和上下文策略,实现持久记忆与长程推理。
Qwen-RobotManip:80 维统一动作空间
操作模型的核心痛点是迁移能力不足——换机器人、换场景,性能就掉。Qwen-RobotManip 的解法是从动作统一和空间统一两个维度切入。
它定义了一套 80 维的统一动作表征,为不同硬件定义通用的"肢体语言"。在此基础上,用完全由开源数据构建的小时级操作数据实现了大规模多机型训练。搭载到不同硬件时,只需数步反馈即可自动适配。
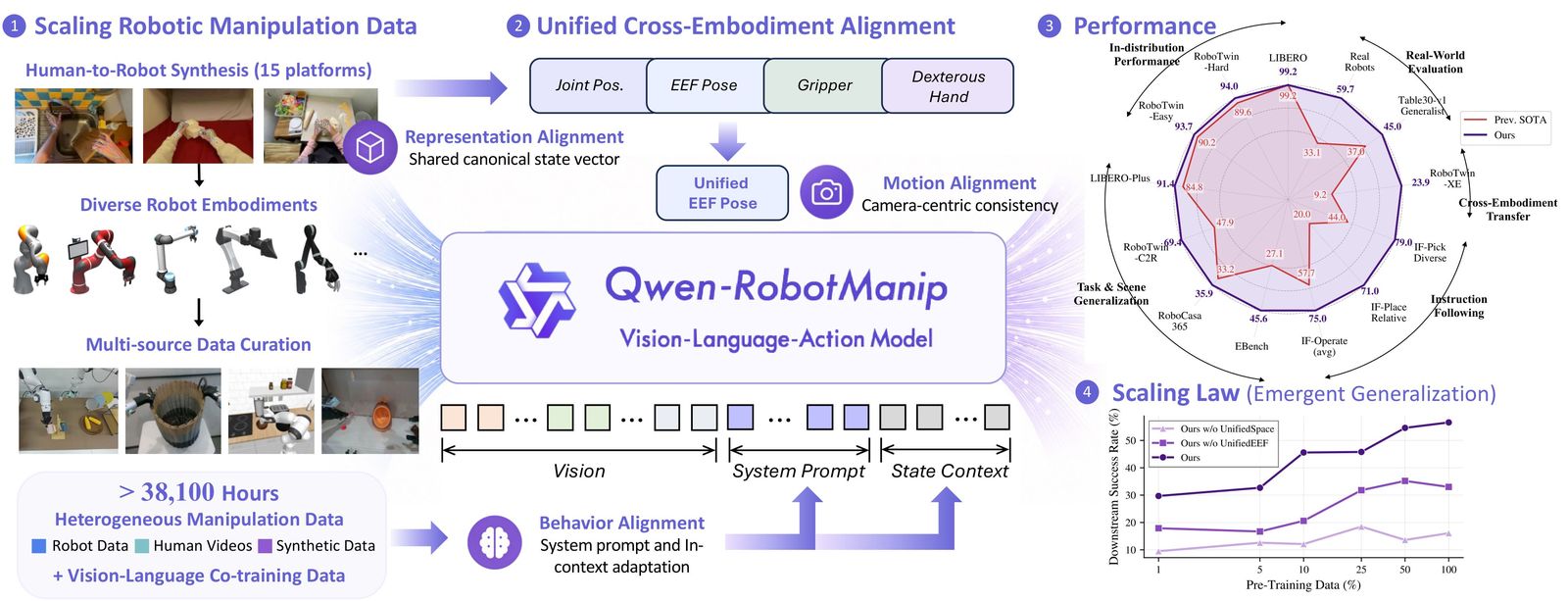
技术底座是 Qwen-VLA 统一框架——基于 Qwen3.5-4B 视觉语言骨干和 1.15B DiT flow-matching 动作解码器,将操作、导航、轨迹预测统一到同一个动作-轨迹预测空间。训练数据涵盖 10000+ 小时公开机器人数据、1000+ 小时内部真实机器人轨迹、800 万+ 合成仿真轨迹。
基准测试成绩:
- LIBERO: 97.9%(统一模型,非逐任务微调)
- Simpler-WidowX: 73.7%
- RoboTwin-Easy/Hard: 86.1% / 87.2%
- 真实世界 ALOHA 双机械臂 OOD 泛化: 76.9%
在 ALOHA 双机械臂平台上,GR00T N1.6 和 π 0.5 都是逐任务独立微调的特化模型,而 Qwen-VLA 是统一全能模型——一个模型处理所有任务、所有形态、所有模态。
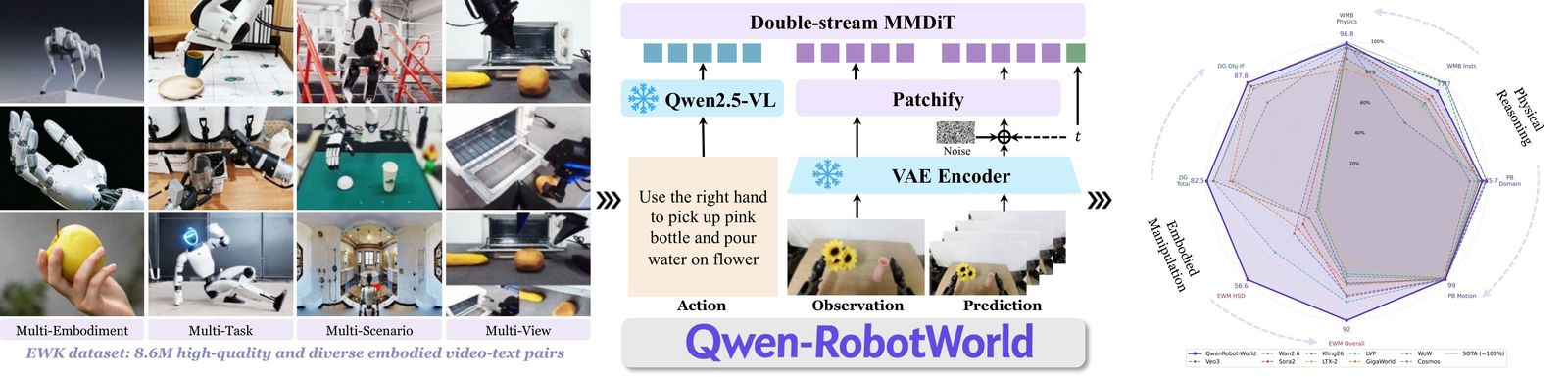
Qwen-RobotWorld:用语言驱动世界模型
第三个模型 Qwen-RobotWorld 以自然语言作为动作接口,将 20 多种机器人形态纳入同一世界模型联合训练。它能基于对物理规律的理解,推理和模拟出下一时间步机器人的合理动作和状态,让机器人在现实世界中可按图索骥般地行动。
协同效应:从单点能力到物理智能体
三个模型的最大价值不在各自独立的表现,而在协同。Qwen 已展示了从语言理解到复杂物理任务执行的闭环:Nav 负责到达目标位置,Manip 负责操作交互,World 负责预测和纠错。上层规划器将自然语言指令分解为子任务,动态调用不同模型,在任务执行中实时分解和自主纠错。
这套组合意味着通用大模型不再是纸上谈兵的规划者,而是可以直接驱动物理行动的"大脑"——语言指令进来,物理动作出去。
- Google 把 Stitch 升级成 AI 原生设计画布3/19/2026
- DLSS 5 引发的争议:老黄说批评者完全错误3/19/2026
- 小米三款大模型齐发:MiMo-V2-Pro、Omni、TTS 完整解读3/19/2026
- ChatGPT App 的模型切换入口,突然变得很难找3/17/2026
- 《华盛顿邮报》把 AI 用到订阅定价上,媒体的个性化收费又往前走了一步3/17/2026
- iOS 26.4 RC 发布:Apple Music 有 AI 歌单,Podcasts 支持视频3/18/2026
- 小米推理模型 MiMo-V2-Pro 上线:智能指数 49,榜单排第 103/18/2026
- MiniMax 发布 M2.7:国内首个公开的模型自我进化方案3/18/2026
- 中国加大对 Meta 收购 Manus 审查:高管限制离境,审查升至国家层面3/18/2026
- 鸿海 Q4 利润不及预期,给 AI 硬件热泼了一盆冷水3/16/2026
- 据路透:华虹旗下华力微电子拟量产 7 纳米,华虹或成中国第二家 7nm 代工厂3/16/2026
- 据报道,微软搁置 Windows 11 多项 Copilot 系统级整合计划3/16/2026
- 爱泼斯坦案幸存者起诉 Google:AI 搜索放大了数据泄露的伤害3/27/2026
- 苹果把 WWDC 2026 定在 6 月 8 日,AI 与开发者工具会是重点3/23/2026
- Google 测试改写搜索结果网页标题,网站对标题的控制权又退了一步3/20/2026
- 营收涨三倍,宇树科技冲刺科创板3/20/2026
- Google AI Studio 升级全栈 vibe coding:Antigravity 代理来了3/20/2026
- 谷歌 Gemini Mac 版内测:桌面端补课正式开始3/20/2026
- Firefox 149 内置免费 VPN:50GB 月流量,首批限四国3/19/2026
- 椰树集团相关公司招标 50 台人形机器人剥椰子,产线开始提具体指标了3/19/2026
- Hugging Face 最大开源仓库快被 AI 垃圾 PR 淹没了3/19/2026
- 欧盟推去衣AI禁令:3月26日表决,执法难在哪3/19/2026
- OpenAI 发布 GPT-5.4 mini 与 nano:小模型加速冲刺3/17/2026
- 英伟达把 DLSS 5 说清楚了:输入只有 2D 帧和运动矢量3/21/2026
- Claude Code 上线 Channels:用 Telegram 和 Discord 操控本地编程任务3/20/2026
- Kimi 员工指称 MiniMax 沿用其 Office Skill 代码始末3/19/2026
- 短视频内容标注,准备进入统一规则阶段3/21/2026
- OpenAI 收购 Astral:Python 工具链收编加速3/19/2026
- Anthropic 超 8 万用户调研:81% 认为 AI 正兑现预期3/19/2026
- 多地试点一人公司:免费公寓+办公空间,能否激活个体创新?3/19/2026