AI 乒乓球机器人击败人类精英:事件相机 + 强化学习的物理 AI 新范式
AI 系统在围棋、国际象棋、电子竞技中早已超越人类顶尖选手,但要在现实物理世界中完成高速、高精度的对抗性运动,难度完全不同。乒乓球对反应速度和空间精度的要求接近人类生理极限——球速可达 30m/s 以上,旋转每分钟数千转,从对手击球到自己需要做出反应的时间窗口只有几百毫秒。
今天发表在 Nature 上的论文介绍了一个名为 Ace 的自主乒乓球机器人系统,据作者所知,这是首个能在正式比赛中与精英人类选手竞争的自主系统。
为什么乒乓球这么难
乒乓球与棋类游戏的本质区别在于:棋类是离散的、回合制的、完全可观测的,而乒乓球是连续的、实时的、对抗性的,且存在物理约束。机器人需要同时解决感知(看到球在哪里、速度多少、旋转如何)、预测(球会落在哪里、对手会怎么打)、规划(该怎么回击)和控制(怎么精确地移动机械臂击球)这几个耦合在一起的问题。
球从对面飞过来到需要回击,总时间大约 0.5-1 秒。减去信号传输延迟、传感器处理时间、规划计算时间和机械臂运动时间,留给"思考"的余量极其有限。传统方法——先用物理模型建模再优化——在这个时间尺度下要么精度不够,要么速度跟不上。
Ace 的技术方案
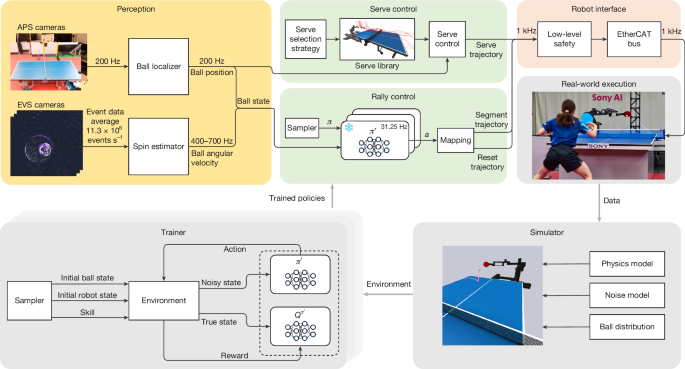
Ace 的核心是两套系统的配合:
事件驱动视觉感知。传统的帧式相机以固定频率(比如 60fps)拍摄画面,每一帧都处理整幅图像。事件相机则完全不同——每个像素独立工作,只在亮度发生变化时输出事件。这意味着运动越快的区域,产生的数据越密集,而静止区域几乎不产生数据。对于高速运动的乒乓球,事件相机可以在微秒级精度下追踪球的轨迹和旋转,同时数据量远小于传统高帧率相机。
模型无关强化学习控制。Ace 的击球策略不是基于物理模型推导的,而是通过强化学习直接从与人类选手的对打中学习出来的。论文使用的是模型无关(model-free)的 RL 算法,意味着机器人不需要精确知道球的空气动力学模型、弹跳模型或对手的行为模型。它通过大量试错学会了如何击球——什么样的球用什么样的角度、力度和旋转回击效果最好。这种方法的优点是能够自适应对手的风格,缺点是需要大量训练数据。
论文还开发了一套高性能机器人硬件:高扭矩、高速度的机械臂,配合低延迟的控制系统,确保从感知到执行的整条链路延迟足够低。
比赛表现
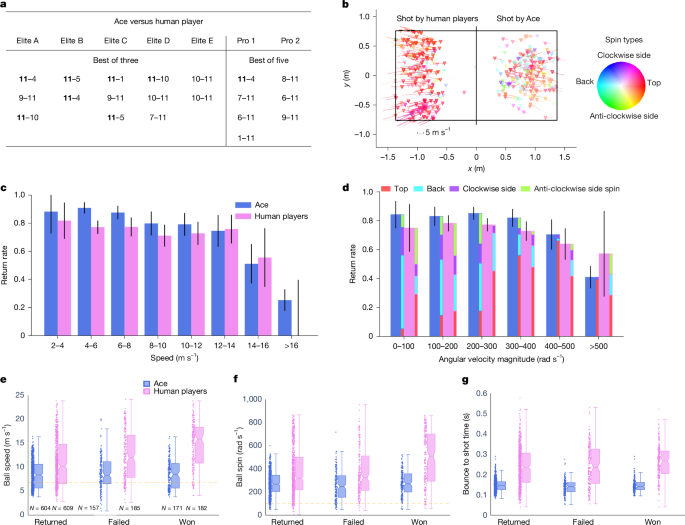
研究团队在正式比赛规则下安排 Ace 与多位精英和职业选手进行对打。Ace 取得了多场胜利,并展示了稳定回击高速、高旋转球的能力。
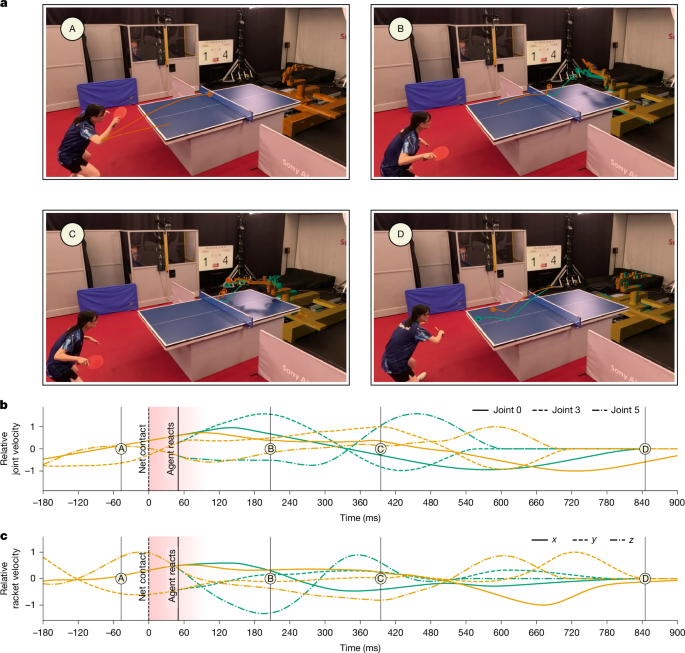
上图的运动学分析显示,Ace 的击球动作在关节速度和球拍速度上都展现了高度协调的运动模式,接近人类专业选手的生物力学特征。
这意味着什么
Ace 展示的是"物理 AI"(Physical AI)在现实世界实时交互任务中的可行性。与 AlphaGo 等系统不同,Ace 的对手和它共享同一个物理空间,球的运动受到空气阻力、旋转、弹跳等复杂物理因素影响,而机器人的每一个动作也受到自身机械特性的约束。
这类技术如果成熟,最直接的应用方向是体育训练——一个不知疲倦、水平稳定、可以精确模拟不同打法的陪练机器人对运动员的训练效率提升是巨大的。更远的应用包括需要快速、精确人机交互的场景,比如手术辅助机器人和工业装配。
但目前仍处于早期阶段。论文也坦诚,Ace 的灵活性和应对非常规球路的能力仍有提升空间,尚需更多研究验证其普适性。
论文: Outplaying elite table tennis players with an autonomous robot, Nature, 2026
- 腾讯玄武阿图因AI在CyberGym测试中超越Mythos7/3/2026
- 美国政府要求 OpenAI 分阶段发布 GPT-5.66/26/2026
- Anthropic 获美国政府批准,恢复 Mythos 5 模型对关键基础设施组织的部署6/27/2026
- 华为开源 920 亿参数 openPangu-2.0-Flash 模型6/30/2026
- Gemini Omni Flash 登顶 Video Arena 盲测榜,领先第二名 101 分7/3/2026
- 华为天才少年的开源AI Agent全书:6700星、十章、可跑实验代码7/20/2026
- OmniRoute:日增 1300+ Star 的开源 AI 网关,一个端点接通 250 个模型提供商7/20/2026
- Hallmark:一份写给AI编码助手的反AI味设计手册7/17/2026
- Voicebox:43K Stars 的开源 AI 语音工作室,7 引擎 TTS + MCP Agent 集成7/19/2026
- DeepSeek 联合北大开源 DSpark:半自回归推测解码,推理速度提升 57% 至 85%6/27/2026
- 27B 模型塞进手机:PrismML Bonsai 27B 把权重压到 1-bit7/18/2026
- 6.4 万 Star 的开源全球情报平台:World Monitor 架构与能力全景7/21/2026
- Qwen3.8 发布:2.4T 参数、原生多模态、开放权重承诺7/19/2026
- Claude Code 被指通过 system prompt 隐蔽传递代理与时区信息6/30/2026
- Cursor 研究:越强的 AI 模型越会"作弊"应对编程基准测试6/26/2026
- Kimi K3 首登 DeepSWE v1.1:开源权重模型挤进前三7/18/2026
- 四个AI模型横扫IMO 2026满分:Claude Fable 5、GPT-5.6 Sol、Kimi K3的42分之战7/23/2026
- Gigatoken:比 HuggingFace 快 1000 倍的开源分词器7/22/2026
- Claude Record a Skill:录屏一次,永久自动化你的工作流7/22/2026
- KTransformers:单 GPU 跑 671B MoE 模型的清华方案7/21/2026
- Qwen-Image-3.0 发布:追求实用的图像生成7/21/2026
- jcode:用 Rust 重写的 AI 编码代理,内存占用仅为 Claude Code 的 1/147/22/2026
- Gemini 3.6 Flash 发布:Token 效率砍 65%,多模态全面领先7/21/2026
- 苹果首款触屏 MacBook 确认搭载 M5 Pro/Max,M7 版计划 2027 年跟进6/27/2026
- AI 代码审查的 token 困境:code-review-graph 如何用代码图谱砍掉 98% 的上下文7/20/2026
- GPT-5.6用一段十页提示词,关闭凸优化30年的复杂性缺口7/19/2026
- Kimi K3:2.8万亿参数开源模型,前端编程Arena登顶7/17/2026
- AI 连破三大数学猜想:Jacobian 猜想 87 年反例与形式化验证的新时代7/21/2026
- B站在WAIC展出开源AI猫娘:能看懂屏幕、主动搭话的桌面伙伴7/18/2026
- 2026 年 AI 都学会了记忆,但你的记忆不属于你7/19/2026